自動運転分野で注目!高精度自己位置推定技術とは?定義と手法を比較解説!
自動運転車両に必須の技術として、近年耳にする機会も多い自己位置推定(自車位置推定)技術ですが、一口に自己位置推定といってもその手法には様々種類が存在しています。
本記事ではこの自己位置推定技術に関して、その定義と各手法について比較・解説をしていきます。
【目次】
・定義
-衛星測位
・結論
【定義】

■自己位置推定技術とは
カーナビゲーションでの道案内や、Google mapなどスマホ地図アプリでの現在地周辺のお店探しなど、今やあらゆる状況下において自分がどこにいるのかを各種デバイスが自動的に教えてくれるようになり、私たちの生活は各段に便利になりました。
これらの技術には、主にGPSという人工衛星から発信される情報を元に自分の位置を計算する方法が使われています。
GPSはもともと軍事目的でアメリカが打ち上げた人工衛星ですが、幅広く民生利用が認められている為、沢山の人や企業がその恩恵を受けています。
今日ではさらに日々の技術進歩に伴い、現在では自己位置を数cm単位で計算・推定してくれる技術も登場してきています。
この技術を使うと、これまで人に理解してもらう事で人を動かす用途から、ロボットや自動車に直接自分の位置と目的地とを高精度に伝え、自動で目的地まで移動させることが可能になります。
但し、高精度の位置推定技術も現時点では万能では無い為、目的に応じて最適な位置推定技術を採用することがサービスを構築する上での重要項目となっています。
■自動運転車両における自己位置推定
自動運転車両における自己位置推定とは、走行中の車両がセンサーより得られた情報をもとに、文字通り自己の位置を推定する技術のことです。
私たち人間が目と耳を使って周囲の情報から自分が今どこにいるのかを把握しているのと同様に、車両制御システムがセンサーから周囲の情報を獲得し、搭載されている地図上に現在どこにいるのかという自身の相対的な位置を推定するというものです。
自動運転システムの位置推定に求められる要件には以下の3点が挙げられます。
1. 精度
2. リアルタイム性
3. ロバスト(安定)性
そもそもなぜ自動運転車両において自己位置推定技術が用いられるのか。
その理由は、走行中の車両の位置と向きを車両自身が把握していなければ正しく経路上を走行することができなくなってしまうからです。もし自己位置推定が失敗した場合、誤ってガードレールに接触するなど大きな事故につながりかねません。自動運転車両の安全な走行を実現するためには欠かすことのできない技術となっています。
【各種手法】

それでは、次に実際に自己位置推定に用いられているいくつかの手法についてご紹介していきます。
■衛星測位
衛星測位ではGNSSを利用します。GNSSとはGlobal Navigation Satellite systemの略で、アメリカのGPSや欧州のGalileo、ロシアのGLONASS、中国のBeiDou(北斗)、そして日本のQZSS(みちびき)などが知られていています。
衛星測位では、衛星から発信される時刻情報から自分の位置を計算して割り出します。
信号を受信できるところではどこでも活用ができるというメリットはありますが、衛星信号を受信できない屋内やトンネルでは使用できません。また信号を反射させるような高いビル周辺では精度が悪くなるというデメリットもあります。
■デッドレコニング
デッドレコニングは別名を自律航法とも言い、オドメトリやIMUを利用した手法です。オドメトリやIMU(ジャイロと加速度計の複合センサ)によって移動量を計測,それを累積計算することにより自分の位置を知る計測方法です。
こちらのメリットとしてはGNSSが苦手とする建物や街路樹の近傍、地下道やトンネルなどの人工衛星の電波を受信できないような環境においても自己位置の推定を行うことができます。また、走行方向検出を遂次的に行う性質上、リアルタイム性の高い計測が可能です。
しかしデメリットとして、高速走行時などは検出した走行方向のわずかな誤差が蓄積していき、短時間で位置推定の大きな誤差を生む可能性もある点は注意が必要です。
この性質上、GNSSなど他の計測方法と複合的に採用されることの多い手法でもあります。
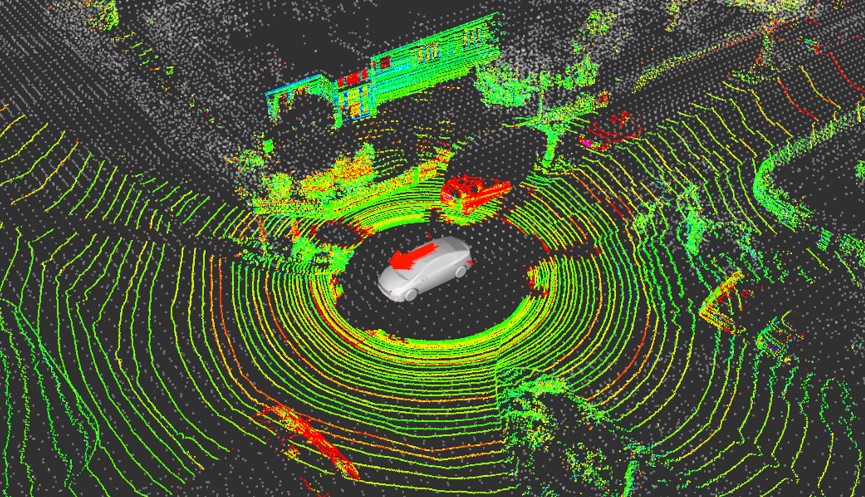
■スキャンマッチング
スキャンマッチング技術とは、システム内の地図データと計測用のセンサーから得られたスキャンデータがそれぞれ一致するように座標変換を行い、地図内での位置と向きを計算することで、逆算する形で自己位置を推定する手法のことです。
LiDARを用いたスキャンマッチングの場合、センサーによりスキャンした周囲の特徴点から自己位置の推定を行うことにより、都市部などでは高い制度での自己位置推定が可能になっています。注意する点として、マッチングさせるための地図データをあらかじめ用意しておく必要があります。また、野原やトンネルといった特徴点の少ない場面ではスキャンマッチングが合わなくなる場合もあります。
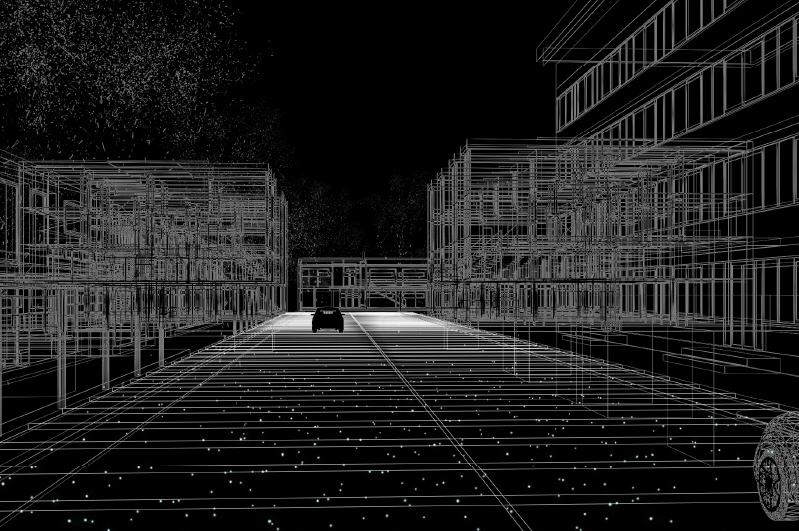
近年では、スキャンマッチングを利用した手法の中でも自己位置推定と地図作成を同時に行うSLAM(Simultaneous Localization and Mapping)という技術が注目されています。
この技術により、センサーから得た周囲の環境情報から地図を作成し、既知点と結びつけることで自己位置の推定も同時に行うというものです。特に、LiDARを用いる場合をLiDAR SLAM、カメラを用いる場合をVisual SLAMといいます。
【各手法の一覧】

【結論】
上記の表の通り、自己位置推定の手法は多岐にわたります。
自動運転車両に限らず自己位置推定技術の導入を検討する際には、導入するエリアの環境情報を考慮したうえで、その環境の特徴に応じた手法を採用することが重要となります。
また、複数の手法を組み合わせることで、苦手とする環境下でのロバスト性を補完することが可能となります。特に、絶対位置を計測するGNSSと相対位置を計測するデッドレコニングは、好相性な組み合わせとして知られています。
つまり、自動運転車両の走行には常に高精度な自己位置推定を求められるため、精度、リアルタイム性、ロバスト性の3点から手法を検討していく必要があるのです。

CLAS対応高精度GNSS受信機「AQLOC-Light」
準天頂衛星「みちびき」のセンチメータ級測位補強サービスの信号を受信し、リアルタイムで移動体の自己位置を高精度測位が可能。受信機およびアンテナに独自の構造を採用し、世界最小レベルの小型・軽量化を実現。
IMU/GNSSを活用した、車両向け高精度位置推定システム。高精度な自車位置推定を行うアルゴリズムにより、安価かつ安定したレーンレベルの位置推定精度を実現。